Software for intelligent optical equipment

Transitioning to enhanced circuit-switched technologies will require a unifying, dynamic, optical control plane.
JOHN FRYER, NetPlane Systems
As the public-network infrastructure transitions from one dominated by circuit-switched technologies to one optimized to support packet-based data traffic, it is clear that underlying optical transport networks will also evolve to meet these changing requirements. The control plane is key to this transition, with the current focus on Generalized MPLS (GMPLS), developed by the Internet Engineering Task Force (IETF), and the optical user-network interface (O-UNI), developed by the Optical Internetworking Forum (OIF).
SONET and SDH have been the workhorses for exploiting optical technology over the past decade or so. Optimized to support the static bandwidth allocation for circuit-switched voice traffic, they require careful planning and provisioning. With increased competition and frequent requirements for increased bandwidth from enterprises, it can be weeks or months before additional circuits are provisioned. More advanced management systems have eased this burden but do not provide dynamic flexibility on a network-wide basis to optimize bandwidth usage.
DWDM has supplemented SONET/ SDH capabilities, greatly increasing network capacity at the expense of another layer of management complexity. The overall result can be a patchwork of end-to-end network connections with "lost" bandwidth in many segments and the inability to provision new circuits without additional equipment costs.
Architecture options
A unifying, dynamic, optical control plane can address many of these operating issues, plus facilitate the creation of new revenue-generating services. These services could include bandwidth-on-demand for applications such as high-quality videoconferencing and specific network storage applications such as backups or disaster recovery. Optical virtual private networks -either in a wholesale carrier-to-carrier or customer-controlled application-have also garnered substantial interest. Deployment of an optical control plane and the choice of network architecture can have a profound effect on the way these services are developed and the speed at which they can be realized.

In the peer model, every device in the network has a complete topological view of all network layers (see Figure 1). That enables any device to calculate and signal an appropriate path through the network based on this overall view. The adoption of a peer model will require that all devices migrate to GMPLS, which although similar has significant differences from classical MPLS. The IP networks comprising the Internet represent the prime example of a peer model.
The more traditional overlay model (see Figure 2) has discrete boundaries between the packet (IP) world and optical/TDM networks. Each has its own independent routing and signaling capability, with the O-UNI providing linkage between the two domains, enabling the packet layer to request services from the optical layer. That does not prevent GMPLS from being used in the optical network and provides the option of using classical MPLS or GMPLS in packet networks.
The attractiveness of each model to service providers is closely aligned with their overall business objectives and network architecture. Large Internet service providers (ISPs), for example, that control their own infrastructure might prefer the peer model, since it leverages one of their key business objectives: providing IP and Internet capabilities, increasingly with enhanced quality-of-service-based services.
Traditional carriers with large embedded SONET/SDH networks supporting circuit-switched services with increasing packet requirements may favor the overlay model. Additionally, the operational structure of carrier organizations and the skill sets within divisions can play a significant role in network planning decisions. Whether service providers opt for the peer or overlay model, there are some key differences between the control-plane requirements of packet and optical networks that introduce new technical challenges.
Control-plane requirements
GMPLS and O-UNI are extensions of the MPLS work undertaken by IETF. MPLS was developed to enhance the best-effort hop-by-hop forwarding mechanisms of IP. It does include the capability to use Layer 2 technology such as frame relay or ATM to support the labeling of packets. But the underlying assumption is that the control plane and data plane flow over the same connection-an in-band control plane-and that different traffic streams are distinguished by their IP headers and pre-pended MPLS labels.
There are many issues with in-band control channels for optical networks. From a pure technology perspective, each node would have to be capable of extracting and injecting control-plane information from every type of connection it supports. With optical-electrical-optical designs, that may be possible, although the challenges and cost penalties may be severe. But as pure optical switches emerge, such a concept becomes impractical. The solution is to support an out-of-band control plane, where a separate control-plane network is created independent of the data plane.
That raises many implementation issues, including synchronization between the control and data planes and failure detection and recovery of two independent but related entities. Irrespective of whether the control plane is in-band or out-of-band, there is the requirement to pass basic information across a link; perform operations, administration, and maintenance functions; and provide information necessary for control-plane implementation, such as neighbor discovery and adjacency plus the types of services supported by a neighbor device.
With optical networks, the label concepts and the control plane itself must be abstracted to support the physical aspects of the relevant technologies. One key feature emerging from the development process is the recognition that all the transport technologies can be grouped under a single control plane, conceptualizing them in a hierarchy (see Figure 3).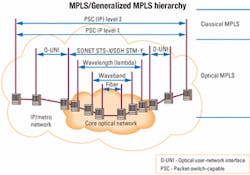
Fibers are the broadest form of connection over which wavelengths flow. Groups of wavelengths known as wavebands can also be created. SONET/SDH can then be overlaid on the lambdas, and in the full peer model approach, packet-switch-capable label-switched paths (LSPs) are supported over the SONET/SDH connections. Optical switches, depending on their design and functionality, could support thousands of connections across a single physical link. Associating a control channel with each connection would be onerous in both the CPU and memory usage. By bundling connections together, a single control channel can support many connections.
There are a number of additional requirements for optical networks that make GMPLS and O-UNI very different from MPLS. MPLS LSPs are unidirectional. Optical connections are typically bidirectional, and GMPLS has been developed with this capability in mind. The settling time of optical components is an issue, and to facilitate rapid establishment of optical LSPs, GMPLS enables the pre-programming of hardware before complete setup has been accomplished. That is in complete contrast to MPLS, where LSP establishment occurs from the egress point to the ingress point of a unidirectional flow.
With optical transport forming the underpinning for all network traffic, reliability and rapid connection restoration are critical factors. Five- or six-nines uptime is a mandatory requirement, with the ability to restore failures to previous levels of operation without service interruption.
The need to provide diverse routing for primary and backup paths is also critical, creating shared-risk link groups. In these kinds of scenarios, paths must be routed over physically separate fiber bundles-not just individual fibers-to avoid catastrophic failure due to a fiber cut. Factors such as the overall architecture of optical networks and the next-generation control plane are key discussion points in the standards committees.
Standards perspective
The initial move toward an optical control plane was driven by IETF with the creation of GMPLS and related standards such as the link-management protocol (LMP) to provide the required link connectivity to support an out-of-band control plane. These standards are progressing through IETF and have spawned additional work, which has transitioned into new working groups like Common Control and Measurement Plane and IP-over-Optical. As yet, there are no requests for comment, which are the IETF standards documents.
The GMPLS standards support both the resource reservation protocol with traffic engineering extensions (RSVP-TE) and constraint-based routing using the label distribution protocol (CR-LDP), although current market interest is almost exclusively focused on RSVP-TE. LMP is a separate protocol. O-UNI extends the IETF protocols to support UNI-specific features, plus additional functionality considered essential by OIF.
OIF has recently ratified version 1.0 of the O-UNI specification. It is now working on network-to-network interface (NNI) requirements and additional UNI features to supplement the work of IETF. Signaling across UNI must translate to GMPLS signaling inside NNI. Currently, there are some feature incompatibilities that must be ironed out for smooth interoperation, which is largely a reflection of the evolutionary status of the overall standards process.
The International Telecommunication Union (ITU) is also actively working on next-generation optical networks. They have focused on architecture aspects through the automatic switched trans port network (ASTN) and automatic switched optical network (ASON). Both O-UNI and GMPLS can be mapped to these concepts and must be considered the lead candidates, although the ITU is open to additional proposals such as an adaptation of ATM's PNNI signaling and routing or a completely new protocol.
Implementation factors
Although the focus is on GMPLS and O-UNI, these protocols only form part of the total solution. GMPLS and O-UNI are signaling protocols and rely on underlying routing protocols such as open shortest path first and intermediate system to intermediate system to provide topology information about the network.
To supplement the best-effort mechanisms of these protocols, traffic engineering enhancements have been developed that enable optical and TDM-specific parameters to be incorporated into a traffic engineering database. A constrained shortest path first engine can then calculate the "best" path through a network, based on specific requirements. This path is then signaled through the network using GMPLS.
As paths are created at various levels of the hierarchy, this information must be injected into the routing information to be disseminated by the routing protocols to other nodes in the network. That is known as a forward adjacency LSP (FA-LSP). In the overlay model, requests are made for core optical resources over the O-UNI protocol. This protocol is only significant across the UNI interface between the requesting client and the network. Connection-management functionality is required to map from the O-UNI interface to the NNI GMPLS interface to signal the connection through the core network. As the incompatibilities between the O-UNI specification and the GMPLS standards disappear, that will become an easier task. Initially, it can be expected that subsets of the full feature sets will be implemented until full compatibility is reached.
The standards process is still in evolution and will probably take one or two years to complete. Many carriers view an intelligent optical control plane as key to future success, although there are still many issues to overcome aside from full standardization. These issues include migration of existing systems and functions into the new control and management plane architecture.
Many traditional carriers are skeptical of using IP-based technology, even for the control plane, because of the perceived instability of the Internet. With standards driving toward support of both a peer and an overlay model, the consensus is that this new functionality is required. The key question is not "if" but "when" an intelligent optical control plane will be developed.
John Fryer is vice president of marketing at NetPlane Systems (Westwood, MA). He can be reached via the company's Website, www.netplane.com.

